In creating an accurate model of a road vehicle for real world, or testing and data collection applications, one may begin with designing it from the scratch to cater to the specific project requirements. For the purposes of this project, we aim demonstrate the motion of a standard size vehicle by the use of a customized small-scale (1/10 scale) vehicle for autonomous driving and vehicular communication. By scaling down the size of a real world system, one may fine-tune the various aspects of that system in a more workable and controlled manner. This small-scale prototype accurately simulates an actual size vehicle’s dynamics and kinematic behavior. The model vehicle chosen utilizes a 4-wheel-drive platform with three LSDs (Front, Rear, and Center), as well as a rack-and-pinion steering system. The model's similarity to a full-scale vehicle's dynamics is crucial for the precise modeling of behavior, especially in cornering scenarios. Perception and machine vision of this vehicle is supported by a 3D LiDAR, a high-resolution stereo camera and depth sensor as well as medium range Infrared and Ultrasonic sensors which have been used for collision avoidance purposes. By utilizing an on-board, high-performance, and low-power NVIDIA AI supercomputer, this platform is capable of supporting the various sensors, communication devices (LTE, DSRC, Wi-Fi, etc.), and complex control algorithms. Moreover, it is powered by a hi-torque brushless electric powertrain and 2 battery packs which will yield an optimal operating time and range.
Small-scale Cooperative Vehicles (SCAVE)



Phase 01 progress (updated on Dec 2017):
Mechanical Platform
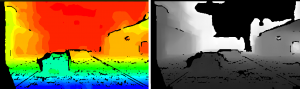
Perception
Path Planning
Cooperation
Check project's github repository:

A fleet of these platforms may be used for the testing and implementation of connected vehicle algorithms and cooperative devices by simulating the scenarios present in the physical world. Included and necessary applications of interdependent automotive behavior are intersections, highways, cutting, merging, and many other significant actions. Programming protocol for these scenarios would not only enable a smoother transition of the autonomous vehicle into our roadways, but also help to optimize vehicular communication networks more efficiently. These vehicles are not only capable of communication via various protocols; e.g. LTE and DSRC, but are also compatible with Controller Area Network bus technology.
Another feature supported by this platform is a comprehensive monitoring dashboard and GUI, which presents a real-time visualization of camera vision, and sensor data collected from the surrounding environment to a point cloud. Other essential statistics that could be exhibited are the vehicle's dynamic and kinematic parameters such as: G-force, yaw-rate (extracted from on-board IMU module), velocity, and GPS coordinates. All of these project components would aid in data collection for not only the vehicle's own autonomous decision-making but for understanding and improving traffic follow through data collection.
We're Hiring!
Are you interested in joining our team?
Become a part of the cutting-edge research in NSL as your senior design project. for more information contact: yaser.fallah@ucf.edu
Read more
For more information or inquiries contact:

Dr. Yaser P. Fallah
Associate Professor
Related Posts

