What is this contraption?
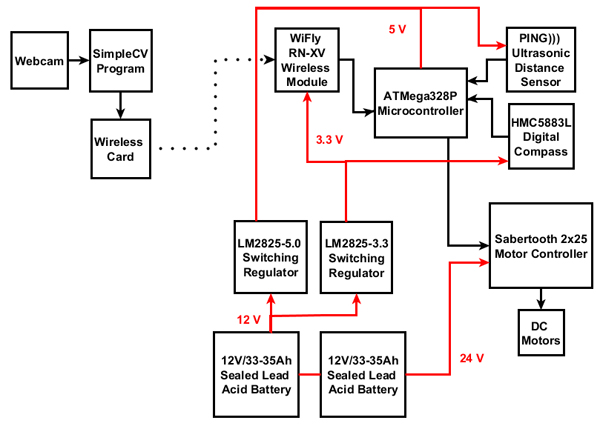
The Manscaper is an autonomous lawn mower that utilizes computer vision software for its navigation subsystem. A Microsoft LifeCam HD-5000 webcam is mounted at the top of a custom-built 10 ft. support structure to ensure that the entire area of operation falls within the FOV of the webcam. The raw image output is then processed by a Python program using the SimpleCV framework installed on the laptop at the base of the support structure. The Manscaper's current position within the image frame is then compared to the boundary pixels established during the initial setup to determine if the mower is safely within the cutting zone. The appropriate navigational commands are then sent via a Telnet connection to the RN-XV WiFly module connected to the ATMega328P microcontroller, located aboard the Manscaper chassis. The Manscaper also comes equipped with an HMC5883L digital compass to ensure accurate turns are executed during operation. As an added safety feature, the Manscaper utilizes a Parallax PING))) ultrasonic distance sensor to prevent the unintentional slaughter of animals (domesticated or otherwise).
Special thanks to the UCF Robotics Club for loaning the DC Motors and to Complete Mobile Boat Repair for providing building materials and work space during the fabrication process.