UCF
DSRC based V2V safety communication
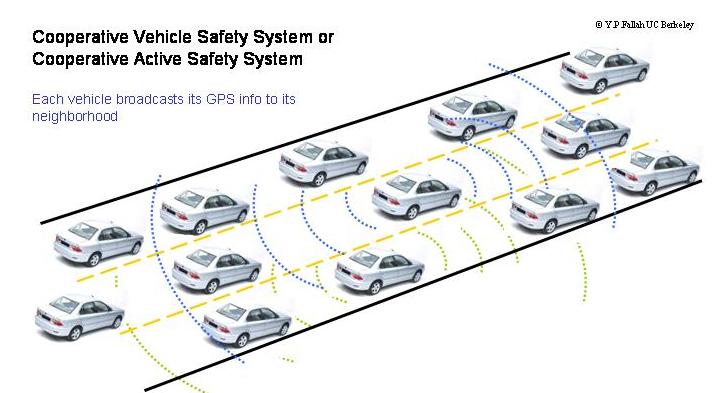
Cooperative vehicle safety (CVS) systems operate based on V2V communication in DSRC safety channel. Scalability is one of the main challenges of such systems.
In CVS systems, vehicles broadcast their physical state information over a shared wireless network to allow their neighbors to track them and predict possible collisions. There are certain parameters of the system (such as transmission power, and rate of message generation) that are controllable and directly impact the overall performance of the system.
The physical dynamics of vehicle movement and the required accuracy from tracking process dictate certain load on the network. But the vehicular network performance is directly affected by the amount of offered load, and in turn directly affects the tracking process. Our proposed congestion control mechanisms (see LRC, GRC algorithms) reduce the effect of congestion and improve tracking performance by adapting and controlling V2V communications rate and range.
We have developed an elaborate
simulation environment using SUMO, NS3, SHIFT and OPNET simulators (You
may obtain our NS3 simulation setup by writing an email to us). We have
also developed mathematical models describing the Vehicular
Ad-Hoc Network on which CVS operates (see TVT2011).
Some of the prepared algorithms have been implemented and tested (see COMM2011)
Our current work is focused on analyzing the V2V communication performance (and congestion control algorithms) using a high fidelity simulator that we have developed in a previous project sponsored by CAMP (NHTSA). We developed the simulator for CAMP using ns-3 and data collected from large scale tests (400 DSRC devices). For more information please refer to our recent paper (will be available online soon):
- SM Gani, A. Tahmasbi, YP. Fallah, "High Fidelity DSRC Receiver Model for ns-3 Simulation Using Large-scale Field Data", to appear in Proc. of 2016 IEEE Wireless Communication and Networking Conference.
-
Yaser P. Fallah, C. L. Huang, R. Sengupta, H. Krishnan, "Design of Cooperative Vehicle Safety Systems based on Tight Coupling of Communication, Computing and Physical Vehicle Dynamics", To appear in Proc. IEEE Int. Conf. on Cyber Physical Systems, ICCPS 2010
-
CL. Huang, Yaser P. Fallah, R. Sengupta, H. Krishnan, "Adaptive InterVehicle Communication Control for Cooperative Safety Systems", IEEE Network Magazine, Jan. 2010 [pdf]
-
CL. Huang, Yaser P. Fallah, R. Sengupta, H. Krishnan, "Inter-vehicle Transmission Rate Control for Cooperative Active Safety System," provisionally accepted to IEEE Trans. on Intelligent Transportation Systems.
-
C. L. Huang, Y. P. Fallah, R. Sengupta, H. Krishnan, "Information Dissemination Control for Cooperative Active Safety Applications in Vehicular Ad-Hoc Networks," Proc. of IEEE Globecom 2009. [pdf]
-
C. L. Huang, Yaser P. Fallah, R. Sengupta, "Analysis of Aggregated Power Level and Rate-Power Control Designs for Status Update Messages in VANETs," Proc. IEEE Mobile Adhoc and Sensor Systems, MASS '2009. conf., pp. 615 - 620, 2009.
-
C. L. Huang, X. Guan, Yaser P. Fallah, R. Sengupta, H. Krishnan, "Robustness Evaluation of Decentralized Self-Information Dissemination Control Algorithms for VANET Tracking Applications," Proc. of IEEE Vehicular Technology Conf. VTC-Fall 2009.
-
S. Rezaei, R. Sengupta, H. Krishnan, X. Guan, R. Bhatia, "Tracking the position of neighboring vehicles using wireless communications", Transportation Research Part C: Emerging Technologies, June 2009
.
